建物設備・ロボット・自動運転車の統合制御システム「Mobility-Core」
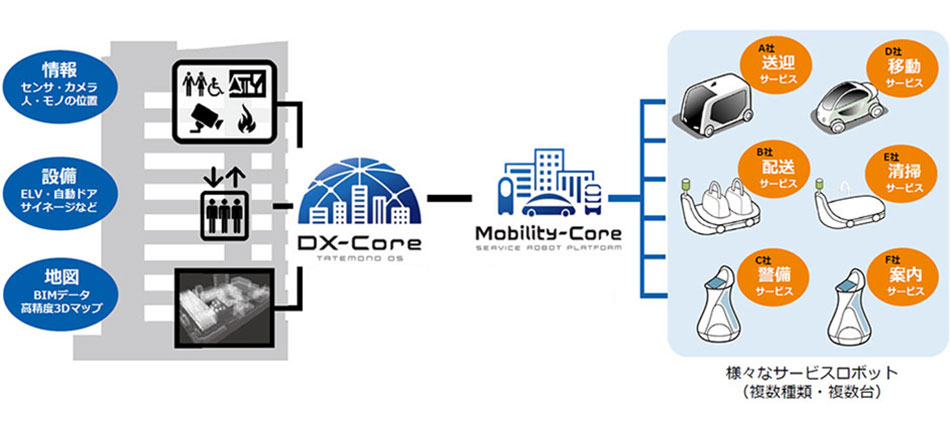
「Mobility-Core」は、施設・街区と自動運転車両・ロボット間の連携基盤として研究開発を進めてきた自動運転プラットフォームを利用し、建物設備と各種サービスロボット・自動運転車を統合制御するシステムです。
施設側の自動運転管制・監視システム、エレベーター等の建物設備と、施設内で稼働する車両・ロボットを連携させるための基盤として機能します。
背景
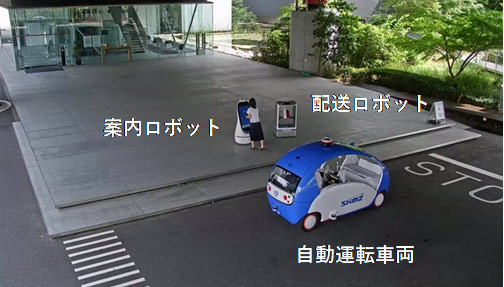
近年、自動運転車による送迎サービスや、自律走行型ロボットによる配送・案内・警備・清掃サービス等の実用化に向けた動きが加速しています。これらのサービスを施設や街区に実装するためには、人と車両・ロボットが混在する空間において、自律型モビリティを安全かつ円滑に運行させるための技術が求められます。
また、サービス機能の高度化を図るうえでは、エレベータ等の建物設備と各種モビリティ、ならびに複数種類のモビリティ間の連携機能を構築する必要があります。
メリット
Mobility-Coreを活用することで、自律型モビリティの開発メーカーやサービス事業者が他社のモビリティや建物設備との連携機能を独自に開発する必要がなくなり、複数のモビリティを組み合わせた施設サービスを容易に展開できるようになります。
実証導入
加賀市医療センター:配送ロボットと自動ドアの連携技術
Mobility-Coreを介して建物OS「DX-Core」と連携させた配送ロボットと自動ドアの連携実証を実施しました。
セキュリティ自動ドアなどと連動して病院内をシームレスに移動しながら業務を行うことができ、ロボット導入による清掃業務・看護業務などの負担軽減の可能性を確認することができました。従来の人による業務に加えてロボットが提供するサービスを組み合わせた業務体制を構築することで、病院施設内のマンパワー不足への対応や、感染症対策のため人との接触機会を抑制した安全な業務運営などを実現できることが確認されました。

メブクス豊洲:複数ロボットのエレベータ同乗技術
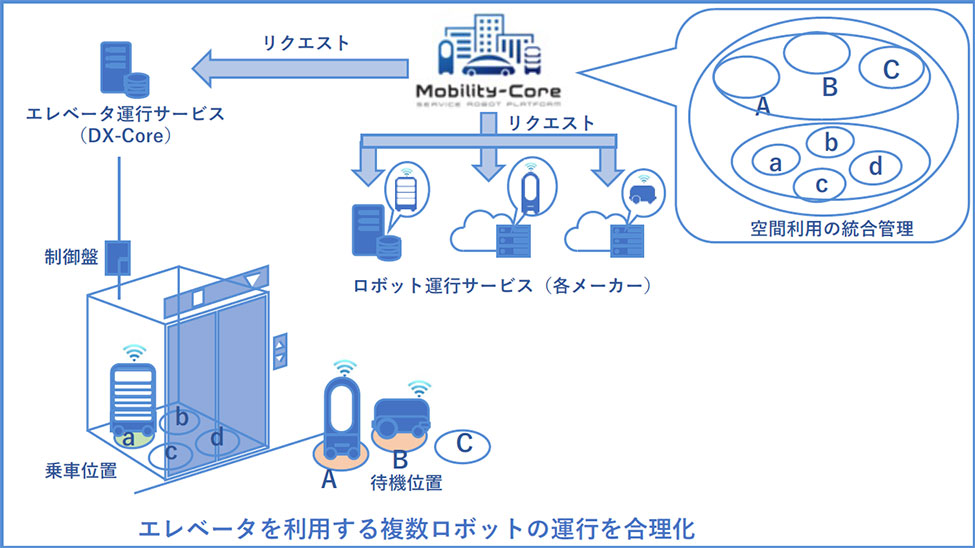
建物設備と各種アプリケーションの相互連携の基盤となる建物OS「DX-Core」と「Mobility-Core」を連携させ、複数のサービスロボットがエレベータを円滑に利用できる環境を構築し、2024年3月まで実証運用を実施しました。具体的には、Mobility-Coreが、稼働中のロボットの走行状況やエレベータの混雑状況を踏まえて、各ロボットにホールでの待機位置やエレベータ内の乗車位置、乗降の順番、移動のタイミングなど指示するとともに、DX-Coreを介して、エレベータへの運行リクエストを行います。
Mobility-Coreがロボットとエレベータの運用・運行を統合制御することで、複数ロボットのエレベータの同時乗降や、乗車・降車をゆずり合うすれ違い乗降、ロボットが搭乗中のエレベータへの他のロボットの相乗り乗降などが可能になり、サービスロボットとエレベータの運行効率の合理化が図れます。

関連情報
ニュースリリース
- 自動運転技術と歩行者ナビを連携した施設内移動サービスを構築(2019.10.17)
- 建物エレベータとサービスロボットの統合制御技術を開発(2020.6.12)
- 建物設備・ロボット・自動運転車の統合制御システムを技術研究所に構築(2021.08.20)
- 建物設備とモビリティ・ロボットの連携サービス開発に向け、豊洲スマートシティでの実証運用を4月1日より開始(2022.03.29)
- 3社共同のモビリティ・ロボット・建物設備連携サービスを 加賀市医療センターに実証導入(2022.09.14)
- 複数のサービスロボットが館内エレベータを相乗り利用(2023.07.20)
- 淡海医療センターの医療サービスをDX(2023.11.17)