2020.06.12
清⽔建設(株)<社⻑ 井上和幸>はこのほど、ロボットを活⽤した様々なサービスを建物内で提供できる「ロボット対応型」施設の実現に向け、エレベータ等の建物設備と複数種類のサービスロボットを、共通のインターフェースを介して統合制御する技術を開発し、技術研究所本館(東京都江東区)に実装しました。本技術により、複数のロボットがエレベータに順番に乗り込むことや、狭い通路を譲り合って通⾏することが可能となり、⼀つの建物内に多様なロボット活⽤サービスを同時に導⼊できるようになります。
近年、⾼齢化等の進展により、⼈⼿不⾜の問題が社会課題として顕在化する中、警備、清掃、案内、送迎、配送などの建物サービスの担い⼿として、ロボットの活⽤が期待されています。また、新型コロナウィルスの影響により感染症対策の強化が求められる社会環境下、今後、ロボットを活⽤した⾮接触型サービスのニーズが⼀層⾼まることが予想されます。
ロボットを活⽤した建物サービスは既に導⼊事例がありますが、現状では、その多くが単⼀フロア内での稼働を前提としたサービスにとどまっています。また、建物とロボットの連携機能がサービスごとに個別に開発されるケースが多いため、建物内で複数のロボットサービスを同時に提供することが難しいという課題がありました。
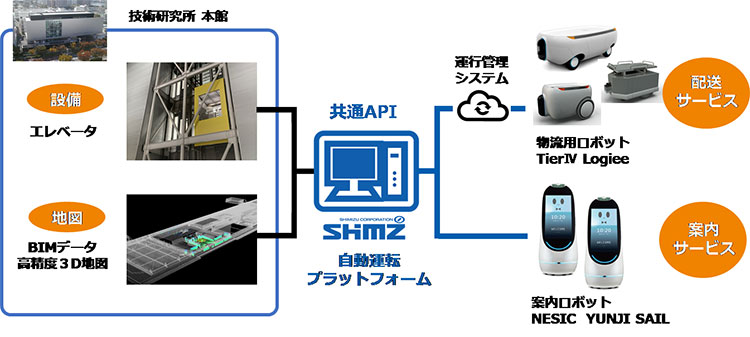
今回開発した建物設備とロボットの統合制御技術は、当社が研究開発を進めてきた、施設・街区と⾃動運転⾞両・ロボット間の連携基盤(⾃動運転プラットフォーム)を利⽤して開発したものです。具体的には、⾃動運転プラットフォームのAPI(Application Programming Interface)を介して、建物内で稼働する⾞両・ロボットの運⾏管理ソフトウェアと、建物側の⾼精度3次元点群地図データ、⾃動運転管制・監視システム、エレベータ制御システムなどを連携させることで、フロアをまたいで稼働する複数種類のロボットの協調動作を実現します。
技術研究所本館では、エレベータ1台と、⾃動運転プラットフォームの共同研究先である(株)ティアフォー社製の物流⽤ロボット「Logiee(ロージー)」、NECネッツエスアイ(株)が販売する案内ロボット「YUNJI SAIL(ユンジ セイル)」を⾃動運転プラットフォームに接続し、2種類のロボットが建物の上下階を⾃由に移動しながら同時並⾏でサービスを提供できることを実証しました。また、統合制御技術と併せて、ロボットが⾃⼰位置推定に利⽤する⾼精度3次元点群地図を建物のBIMデータから⾃動⽣成する技術も確⽴しました。
本技術を導⼊した建物では、サービス事業者がロボットと建物設備の連動システムを独⾃開発する必要がなくなるため、新たなロボット活⽤サービスを容易に展開でき、建物利⽤者の利便性と建物価値の向上につながることが期待できます。今後、本技術で統合制御を⾏う建物設備やサービスロボットの拡充を⽬指し、ロボットサービス事業者等に共同実証への参加を働きかけていく考えです。
Logieeについては、ティアフォー社のクラウド上の運⾏管理システム経由で⾃動運転プラットフォームに接続。
≪参考≫
(株)ティアフォーについて
名古屋⼤学発のベンチャーとして2015年12⽉に設⽴された、世界初のオープンソースの⾃動運転OS「Autoware※」の開発を主導するディープテック企業。⾃動運転技術の発展を通じ、様々な組織、個⼈が⾃動運転技術の発展に貢献できるエコシステムの構築を⽬指す。
「Autoware」は、The Autoware Foundationの登録商標。
技術研究所本館へ実装した建物設備とロボットの統合制御技術
技術研究所本館での実証

書籍配送サービスと来客案内サービスの実証映像
ニュースリリースに記載している情報は、発表日現在のものです。ご覧になった時点で内容が変更になっている可能性がございますので、あらかじめご了承ください。ご不明な場合は、お問い合わせください。