2023.07.20
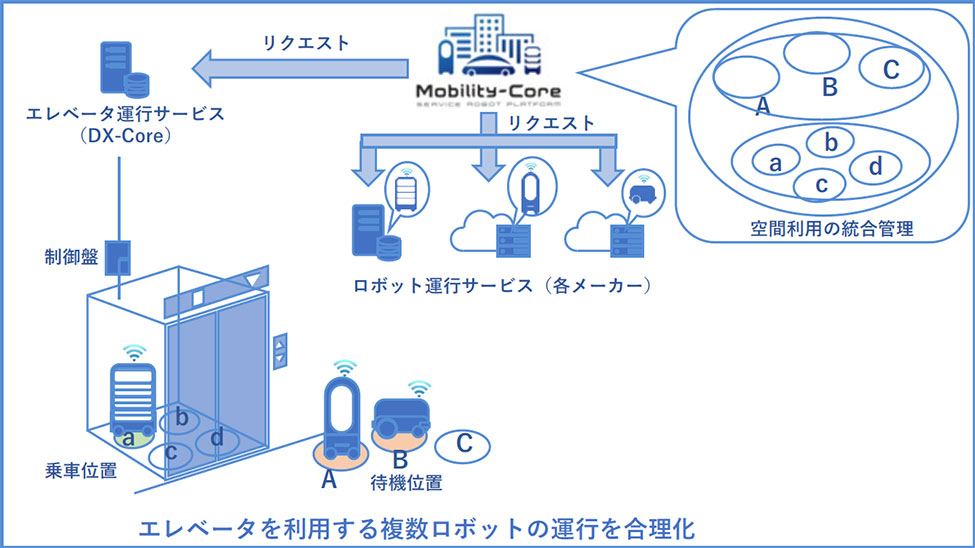
清水建設(株)<社長 井上和幸>はこのほど、施設内で稼働する複数のサービスロボットがエレベータを共用しながらそれぞれの目的階まで円滑に移動するためのエレベータ同乗技術を確立し、自社運営のオフィスビル「メブクス豊洲」に実装しました。本技術では、自社開発した複数ロボット・モビリティの統合制御システム「Mobility-Core」を利用し、ホールでの待機位置や、かご内の乗車位置、乗降の順番など、エレベータ内外におけるロボットの空間利用を統合的に管理することで、ロボット同士の干渉による走行不全や膠着を回避し、タイムロスの少ない効率的なサービスロボットの運用を実現します。
配送、案内、警備、清掃などの施設サービスを担うロボットの実用化が進み、用途やメーカーが異なる複数のロボットを導入する施設も増えつつあります。こうした施設において複数のロボットがフロア間を移動してサービスを提供する場合、エレベータとロボットを個別に連携させる従来の制御手法では、1台のロボットがエレベータを使用すると、フロア間を移動しようとする他のロボットは長時間の待機を強いられることになります。また、エレベータ待ちのロボットでホールが混雑すると、近接したロボット同士が互いを障害物と認識してしまい、自律走行を阻害する懸念もあります。
今回、エレベータ同乗技術を実装したメブクス豊洲では、建物設備と各種アプリケーションの相互連携の基盤となる建物OS「DX-Core」と、共通のAPIを介して複数のロボットを統合制御する「Mobility-Core」を連携させ、複数のサービスロボットがエレベータを円滑に利用できる環境を構築しています。具体的には、Mobility-Coreが、稼働中のロボットの走行状況やエレベータの混雑状況を踏まえて、各ロボットにホールでの待機位置やエレベータ内の乗車位置、乗降の順番、移動のタイミングなど指示するとともに、DX-Coreを介して、エレベータへの運行リクエストを行います。
Mobility-Coreがロボットとエレベータの運用・運行を統合制御することで、複数ロボットのエレベータの同時乗降や、乗車・降車をゆずり合うすれ違い乗降、ロボットが搭乗中のエレベータへの他のロボットの相乗り乗降などが可能になり、サービスロボットとエレベータの運行効率の合理化が図れます。
今後、メブクス豊洲での実証運用を通じて、複数ロボットのエレベータ同乗技術の実効性をさらに高め、施設内でのロボットサービスの拡充・高度化に寄与していく考えです。
以上
≪参 考≫
複数ロボットのエレベータ同乗技術

実証試験の動画
ニュースリリースに記載している情報は、発表日現在のものです。ご覧になった時点で内容が変更になっている可能性がございますので、あらかじめご了承ください。ご不明な場合は、お問い合わせください。