2021.08.20
清水建設(株)<社長 井上和幸>はこのほど、施設・街区と自動運転車両・ロボット間の連携基盤として研究開発を進めてきた自動運転プラットフォームを利用し、建物設備と各種サービスロボット・自動運転車を統合制御するシステム「Mobility-Core」を当社技術研究所(東京都江東区)に構築しました。今後、自律型モビリティを活用した施設・街区内サービスの社会実装に向け、日常的に人が活動する実用環境下で、複数のモビリティが連携して提供する各種サービスの技術検証を進めていきます。
近年、自動運転車による送迎サービスや、自律走行型ロボットによる配送・案内・警備・清掃サービス等の実用化に向けた動きが加速しています。これらのサービスを施設や街区に実装するためには、人と車両・ロボットが混在する空間において、自律型モビリティを安全かつ円滑に運行させるための技術が求められます。また、サービス機能の高度化を図るうえでは、エレベータ等の建物設備と各種モビリティ、ならびに複数種類のモビリティ間の連携機能を構築する必要があります。
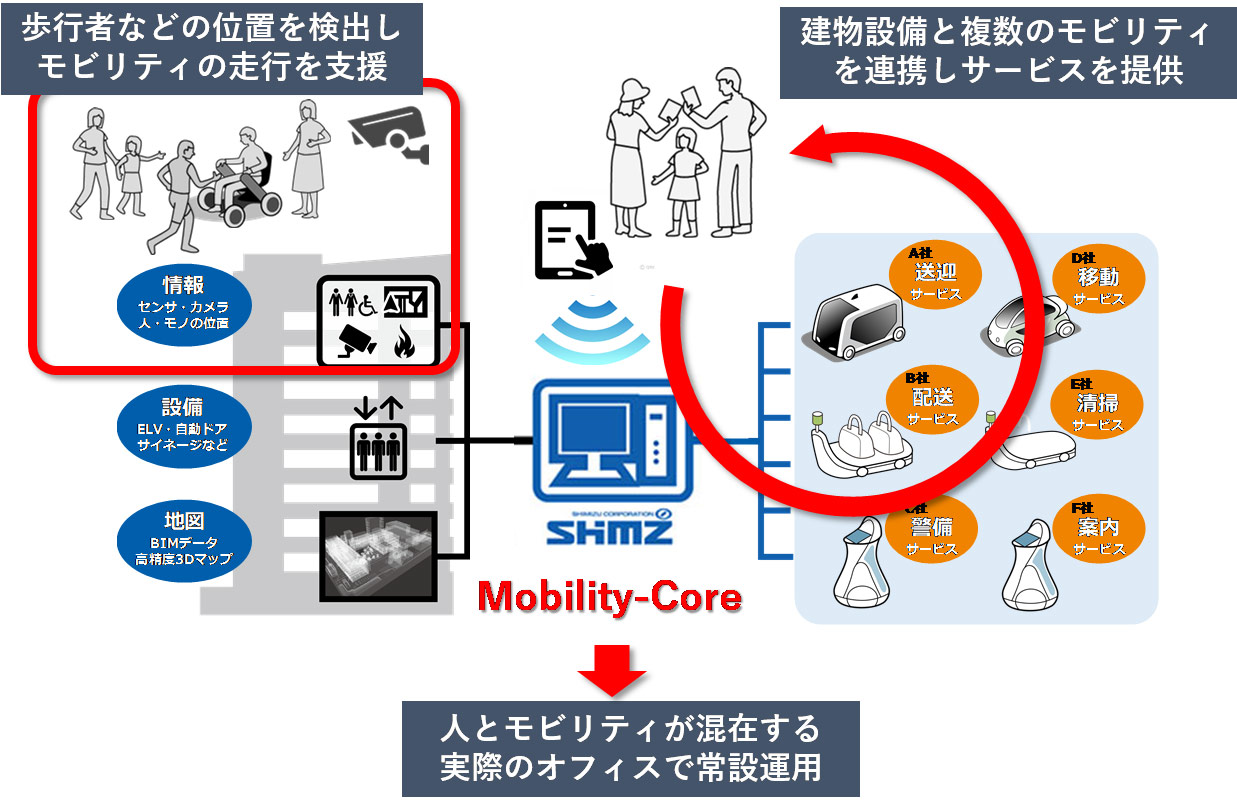
当社が開発した「Mobility-Core」は、施設側の自動運転管制・監視システム、エレベータ等の建物設備と、施設内で稼働する車両・ロボットを連携させるための基盤として機能します。この基盤を活用することで、自律型モビリティの開発メーカーやサービス事業者が他社のモビリティや建物設備との連携機能を独自に開発する必要がなくなり、複数のモビリティを組み合わせた施設サービスを容易に展開できるようになります。
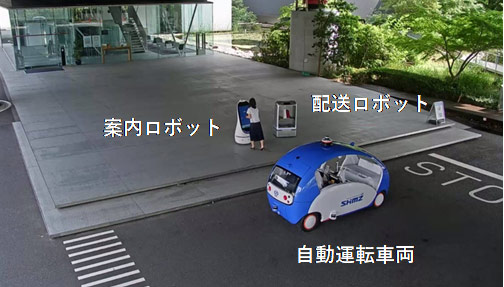
技術研究所に構築したシステムには、エレベータ・自動ドア・サイネージ・監視カメラ・センサー等の建物設備、(株)ティアフォー製の自動運転EV「Milee(マイリー)」、NECネッツエスアイ(株)が提供する自律走行型案内ロボット「YUNJI SAIL(ユンジ・セイル)」と自律走行型配送ロボット「YUNJI DELI(ユンジ・デリ)」を接続しています。これらの要素を組み合わせた施設内サービスとして、自動運転車両による構内送迎と自律走行型ロボットによる施設内誘導を連携させたサービス機能等を構築し、常設運用します。
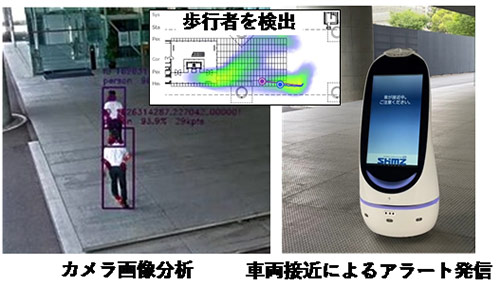
また、供用中の施設内でのサービス運用にあたり、自律型モビリティの安全な走行を支援するため、敷地・建物内の監視カメラの画像分析によりモビリティ周辺の歩行者や自動車の位置を検知し、アラート情報を発信する技術を整備しました。
今後、技術研究所での日常的なサービス運用を通じ、実用化に向けた課題を検証するとともに、自律型モビリティの開発メーカーやサービス事業者とのアライアンスの場として当施設を活用し、各種サービスの新規開発につなげていく考えです。
以上
≪参 考≫
Mobility-Coreを介した建物・モビリティ連携(イメージ)
連携サービスのイメージ映像
ニュースリリースに記載している情報は、発表日現在のものです。ご覧になった時点で内容が変更になっている可能性がございますので、あらかじめご了承ください。ご不明な場合は、お問い合わせください。