配筋アシストロボ
重量鉄筋の配筋作業※1をアシストするロボットアーム型の作業支援ロボット「配筋アシストロボ」は、国土交通省のi-Construction施策※2に沿った建設現場の生産性向上を目的に、共同開発されました。
概要
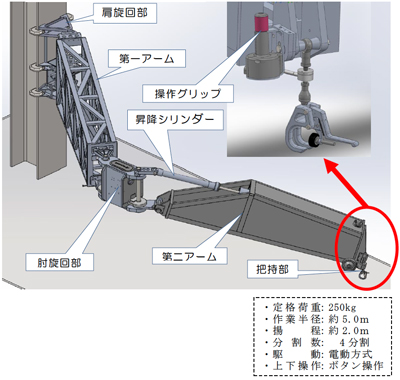
「配筋アシストロボ」は、人間の右肩、上腕、肘、下腕、手にそれぞれ相当する「肩旋回部」「第一アーム」「肘旋回部」「第二アーム」「把持部」の5つのパーツと制御盤から構成されています。全体の動きをアシストするサーボモーターを肩旋回部と肘旋回部、第二アームに組み込むことで、人間の右腕に近い動作を実現しています。
配筋作業時には、「配筋アシストロボ」をH型鋼などの鉄骨柱に固定した後、把持部に重量鉄筋を掴ませ昇降ボタンを使って持ち上げます。その後は、作業員が片手で握った操作グリップを動かしたい方向に押すだけで、その動きに合わせてサーボモーターが作動して、鉄筋を移動できます。アームが操作者の意思に沿って直感的かつなめらかに動き、難なく配筋できます。重量鉄筋の配筋に必要な作業員は、操作者1人、鉄筋の介添え者2人の計3人です。従来6~7人を必要としていた200kgクラスの重量鉄筋の配筋作業を半数以下の作業員で行えます。ロボット操作は、配筋作業経験に関係なく、誰でも簡単に行うことができます。
なお、「配筋アシストロボ」の作業半径は約5mです。作業の進行に合わせて設置替えする必要がありますが、各パーツの重量を約40~60キロに抑え、かつシンプルな組み立て方式を採用しているため、作業員3人程度の手作業により20分程度で解体・設置できます。
- 鉄筋を所定の取り付け位置に配置していく作業。
- 「ICT の全面的な活用(ICT 土工)」等の施策を建設現場に導入することによって、建設生産システム全体の生産性向上を図り、より魅力ある建設現場を目指す取り組み。
(国土交通省HPより引用:http://www.mlit.go.jp/tec/tec_tk_000028.html)
配筋アシストロボの概念図
配筋アシストロボの稼働テストの模様