掘進中のシールドマシンの位置を可視化「Shimz AR シールド」
「Shimz AR シールド」※は、地中を掘進するシールドマシンの現在位置をタブレット端末のAR画面でリアルタイムに確認できるシステムです。
(株)菱友システムズと共同開発
背景
シールドトンネル工事では、事前に設定した計画線に沿ってトンネルを掘り進めていきますが、地中を移動するシールドマシンの現在位置を地上から把握するのは容易ではありません。工事の進捗データを基に時々の掘進場所を推定することはできますが、1日に最大で10m以上掘進するシールドマシンの現在位置を正確かつリアルタイムに捕捉するのは困難でした。
概要
「Shimz AR シールド」は、シールドトンネル工事の情報共有ツールとして開発されたシステムです。地表面にかざしたタブレット端末のカメラ画面に、現在の正確な位置情報を反映したシールドマシンのモデル画像を投影することで、地中を掘進するシールドマシンの現在位置を下記の流れでリアルタイムに確認できます。
- 1. タブレット端末のアプリ画面の受信ボタンをタップし、シールドマシンから発信される現在位置情報を取得する。
- 2. トンネル計画中心線上の測点に設置した座標情報を有するARマーカーをタブレット端末のカメラで撮影し、端末側の現在位置を確定させる。
- 3. 端末とマシンの位置情報がシステム上でひも付けられ、可視化の準備が完了する。
- 4. 端末のカメラを地表面に向けると、シールドマシンの現在位置を示すモデル画像が実映像に重ね合わせて端末のAR画面に表示され、確認できる。
操作者が移動した際には、自己位置推定技術によりタブレット端末の位置が適宜補正されます。また、掘削の進捗に応じてシールドマシンが移動した際も、位置情報が随時更新され、それに合わせてAR画面のモデル画像も移動します。
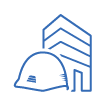
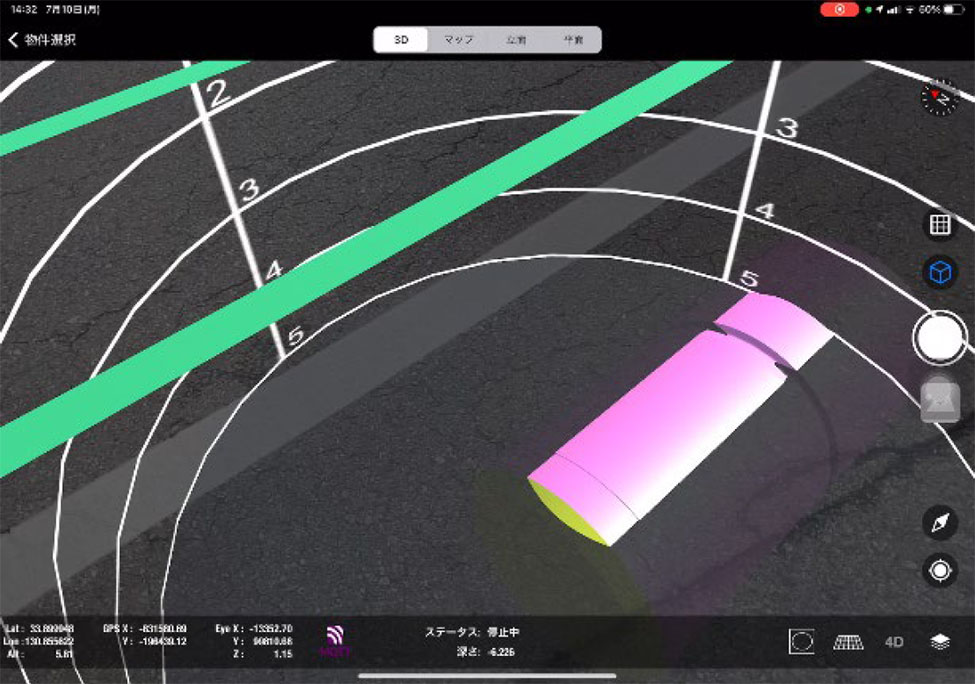
タブレット端末のAR画面は、「3Dモード」と「2Dモード」から選択できます。3Dモードでは、地下の透視画面にシールドマシンの3次元モデル画像を実際の深度を反映して表示。2Dモードでは、シールドマシンの平面形状を地表面に実物大で投影して可視化します。
実証実験
福岡県内で施工中の自社のシールドトンネル現場で行った実証試験では、数㎝レベルの誤差でシールドマシンの現在位置を捕捉でき、システムの有効性を確認できました。
メリット
本システムを活用することで、工事関係者や地域住民に現在の掘削位置や掘削進路を現地で簡単に説明できるようになり、掘進イメージの共有がスムーズに進む効果が得られます。