視覚障がい者移動支援ロボット「AIスーツケース」
当社は、他の4社※1とともに「一般社団法人次世代移動支援技術開発コンソーシアム(以下、コンソーシアム)」を設立し、視覚障がい者移動支援ロボット「AIスーツケース」の開発を進めています。このコンソーシアムは、視覚障がい者の実社会におけるアクセシビリティ※2と生活の質向上を目的として設立されたもので、AIを活用した移動やコミュニケーション支援のためのAIスーツケースの開発と、社会実装に向けた実証実験およびデモンストレーションに取り組んでいます。また、当社独自でもAIスーツケースの開発を進めており、その過程で得られた知見や技術をコンソーシアムと共有し、機能向上を図っています。
コンソーシアムの活動および自社での開発を通じて、障がいのある人もない人も、互いに、その人らしさを認め合いながら共に生きる「共生社会」の実現を目指します。
- コンソーシアムを創設した5社:アルプスアルパイン株式会社、オムロン株式会社、清水建設株式会社、日本アイ・ビー・エム株式会社、三菱自動車工業株式会社
- アクセシビリティ:情報やサービスへのアクセスのしやすさのこと
AIスーツケース
開発内容
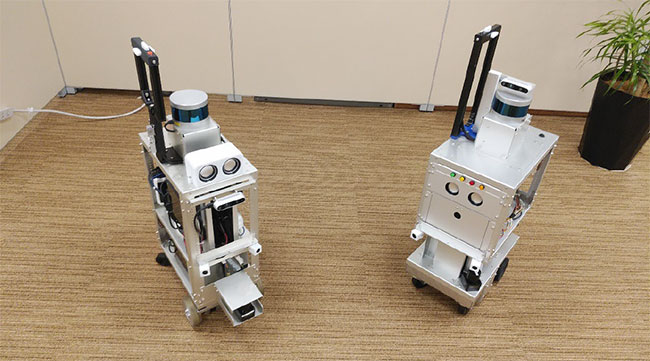
AIスーツケースは、視覚障がい者が日常生活で自然に携行できることを目指したスーツケース型ナビゲーションロボットです。カメラをはじめとしたさまざまなセンサから得られる情報と、最新のAI・ロボット技術を組み合わせており、使用者がロボットの一部であるハンドルに導かれる形で一人で歩行できることが特徴です。
AIスーツケースのオリジナルはカーネギーメロン大学にて開発されたCaBotと呼ばれるロボットです。コンソーシアムではCMUから技術提供を受け、他の大学とも協業するとともに開発した技術を社会に技術を還元するため、GitHubを介したオープンソースハードウェア・オープンソースソフトウェアの仕組みで開発を進めています。
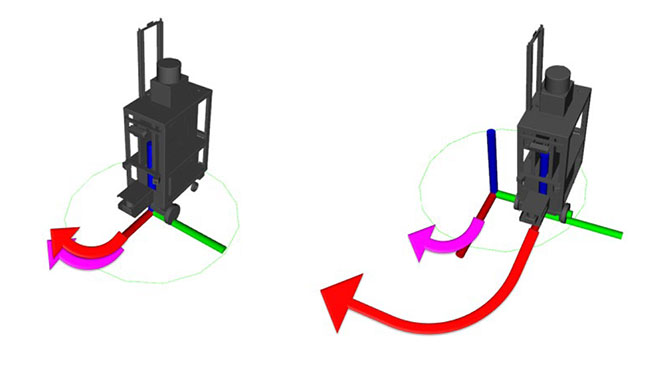
使用者を中心とした自律走行機能
AIスーツケースは施設内での視覚障がい者の誘導が大きな使用目的であることから、高い安全性と安定性が求められます。しかし、通常の自律走行ロボットのソフトウェアで走行させると、周囲との距離の取り方がロボット中心となるため、隣を歩く使用者の歩くスペースを考慮しなかったり、方向転換の動作が必要以上に大きくなるなどの課題がありました。そのため、経路計画点、指令速度、衝突判定範囲などを調整することで、使用者の快適な移動を実現しました。


コンソーシアム版AIスーツケース
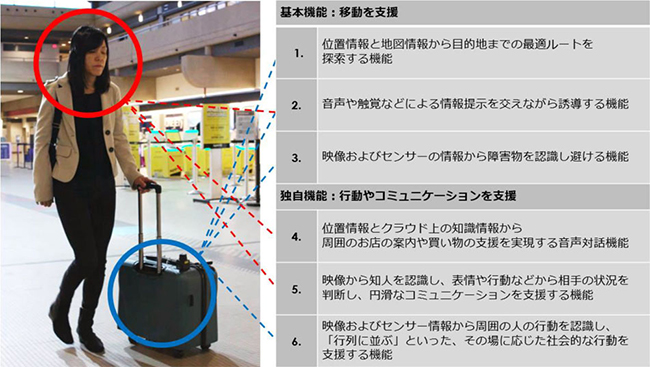
2020年11月に発表したコンソーシアム版のAIスーツケースは目的地までの自律走行と同時に、次のような機能も搭載しており、その一部について、コレド室町で実証実験を実施しました。
行動やコミュニケーションを支援する機能
- 位置情報とクラウド上の知識情報から、音声対話機能によって周囲の店舗案内や買い物の支援を実現する
- 映像から知人を認識し、表情や行動などから相手の状況を判断する
- 映像およびセンサの情報から周囲の行動を認識し、「行列に並ぶ」などその場に応じた社会的な行動を支援する
社会状況を反映した機能
- 映像およびセンサの情報からソーシャルディスタンスを確保しながら誘導する
- 映像からマスク着用有無を判定し音声と振動で知らせることで、使用者の状況に応じた行動を支援する
- マスク着用時でも映像から知人を認識し、円滑なコミュニケーションを支援する
シミズ版AIスーツケース
コンソーシアム版との違い
コンソーシアム版と並行して独自開発したシミズ版AIスーツケースでは、コンソーシアム版と比較して追加のセンサやアクチュエータが着脱可能となる拡張性を重視し、新たな研究開発要素を取り入れた試験が簡単にできるよう、ロボット単体によるシンプルなシステムインテグレーションを設計思想とし、力覚センサによる操作や衝突回避機能、建物情報の管理・読み上げといった独自の実装をしています。
力覚センサによる操作
ロボットのハンドル根元部分に搭載した力覚センサにより、使用者がハンドルに対しどのような力やひねりを加えているかを検出できます。使用者がハンドルに左右方向の力を加え、あらかじめ登録されたスポットの中から目的地を選択してハンドルのスイッチを押せば、AIスーツケースが自律走行を開始し使用者の手を引いて目的地まで誘導してくれます。自律走行速度は、ハンドルに加わった力を検知して、スイッチよりも直感的に調整できるほか、手動走行モードに切り替えて自律走行を切り、ハンドルへ軽く力を加え、使用者の意志でロボットに走行させることもできます。


衝突回避機能
ロボットの自律走行アルゴリズムでは、障害物を回避しながら目的地まで移動する機能がすでに含まれていますが、上記のように使用者からの移動指令も受け付けるようになったため、障害物の回避についても新たな機能を追加しています。近年研究が進められている、制御バリア関数(Contral Barrier Function: CBF)による衝突回避アシスト制限則を組み込み、使用者を含めた障害物の衝突回避を可能にしました。AIスーツケースで周囲の物体を検知しながら力覚センサによる手動操作と合わせることで、利用者の意思で自由に、そして安全に散策することができます。
建物情報の管理、読み上げ
当社が以前共同開発した音声ナビゲーションシステムとの大きな違いは、音声による案内だけでなく、使用者が物理的にロボットのハンドルに触れているだけで、ロボットが目的地まで導いてくれるため直感的かつ楽に使えることです。継承された音声ナビゲーションシステムの技術をロボットと連携することにより、コンソーシアム版では、音声ナビゲーションと同様にスマートフォンによる目的地の選択や移動中の音声ガイドを行っています。シミズ版は、ロボット単体ですべての対応を完遂することを目指し、移動中の使用者に直接ロボットが音声で周辺情報を提供します。