AIによるトンネル掘進計画の最適化「シールド掘進計画支援システム」
シールド掘進計画支援システム※は、AIがトンネル計画線に応じたシールド機操作の計画値、セグメント配置計画を自ら設定し、自己学習を繰り返しながら、これらを改善、最適化していくシステムです。
名古屋工業大学との共同開発
シールド掘進計画支援システムの概要
本システムでは、シールド掘進をゲームに見立て、与えられたトンネル計画線に応じてAIが自ら設定したシールド機操作の計画値、セグメント配置計画を試行条件として模擬掘進を行い、その結果を得点化します。AIは得点を最大化することを目的に試行条件を改善しながら模擬掘進を繰り返し、これ以上得点を上積みできない試行条件に達した段階で、これを最適解とする仕組みとなっています。
シミュレーションイメージ
試行条件の設定
トンネル計画線やシールドマシンの形状、セグメントの種類などの情報をAIに与え、シールド機操作の計画値、セグメントの配置計画などの試行条件を設定させます。
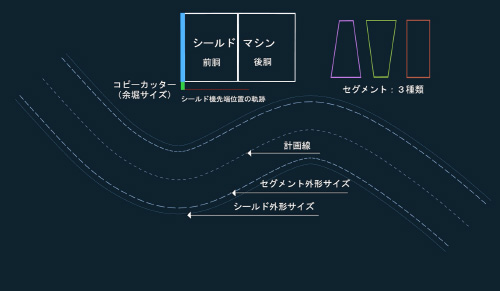
AIは、これらの情報に基づいて、自ら試行条件を設定する
試行と結果の得点化
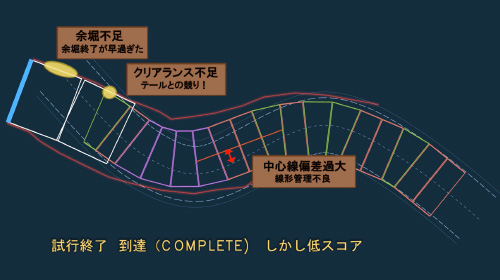
AIは、自らが設定した試行条件に基づき模擬掘進を開始。結果は、トンネル線形に対する掘進軌跡の誤差や、シールド機とセグメント・掘削地山との干渉度合等を評価指標として得点化します。AIは、この得点を最大化することを目的に、試行を繰り返します。
なお、模擬掘進中に掘進誤差の許容値を上回った場合や、シールド機とセグメントが干渉する可能性が出てきた場合は、その時点で掘進終了となります。
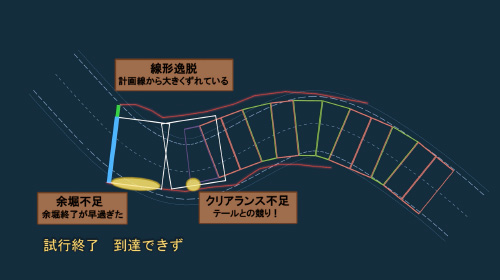
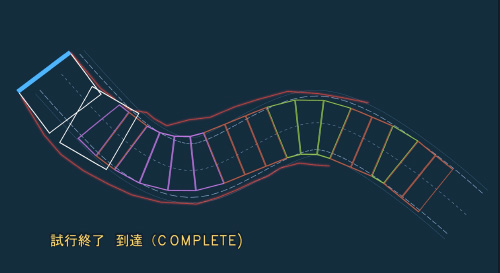
シールド機は目標地点に到達できない
計画完成
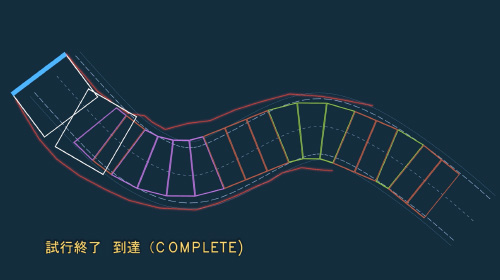
AIは膨大な試行を重ねる中で、どのように条件を設定すれば高得点を獲得できるか自己学習し、最終的にそれ以上は上積みできない最高得点に到達します。この段階の試行条件が最適解であり、実際の掘進計画に活用されます。
日々の掘進計画書作成にも活用可能
本システムは、直近の掘進状況を踏まえた計画修正シミュレーションをAIに実施させることで、掘進開始後の掘進指示書の作成にも活用できるため、計画時の生産性向上に留まらず、現場技術者の日々の労働時間削減にもつながることが期待できます。