ロボ・スコープ(被災建物内探査)
東北大学および東北大学大学院教授の田所諭が代表を務めるNPO国際レスキューシステム研究機構はこのほど、大地震等により倒壊した建物内部の無人探査を目的に、遠隔操作により堆積したガレキ内を移動しながら内部の映像情報を取得し、送信できる被災建物内探査システム「ロボ・スコープ」を共同開発、その実用化に目処をつけました。
なお、共同開発にあたっては、当社が全体システムの開発、東北大学と国際レスキューシステム研究機構が能動スコープカメラの機能アップを担当しました。
概要
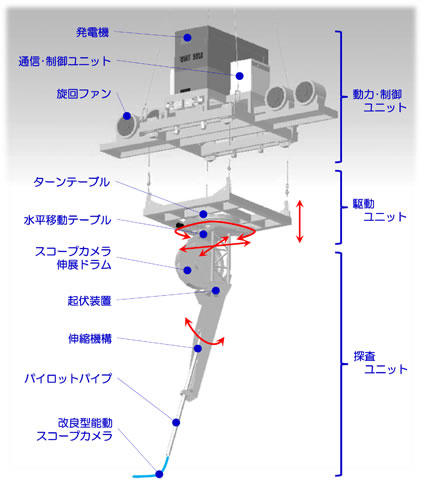
二次崩壊を防止できる探査システムの共同開発をロボットの権威である田所教授に提案したところ、その有効性が認められ、共同開発が実現しました。実用化の目途がついたシステムは3つのユニットに分かれており、下から順に、ガレキ内に下向きに侵入していく能動スコープカメラを先端に具備したホース状の探査ユニット、探査ユニット先端をガレキ開口部に導く駆動ユニット、両ユニットの制御と通信を行う動力・制御ユニットで構成されます。
能動スコープカメラ
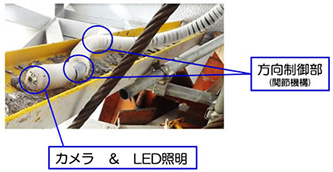
直径約70mm、長さ10mの装置で、先端にカメラ、LED照明を備えています。ホース外部は繊毛で覆われており、この繊毛に振動を与えることで挿入方向の推進力が発生します。ガレキをかいくぐるための方向制御は、内視鏡のように先端部の関節を折り曲げることで対応します。実験により、先端近傍に2箇所の関節機構を設けることで探査性能が飛躍的に向上することを確認しています。能動スコープカメラの推進、関節の首振り、照明のオン・オフなどは、ビデオゲーム機同様のコントローラで遠隔操作します。
探査作業
初めにクレーンにより、システムを探査部位の上空に吊り込みます。続いて、コントローラを用いて、カメラ画像を見ながら探査ユニットの先端をガレキ開口部に導びいた後、能動スコープカメラをガレキ内に挿入しガレキ内情報を取得します。この探査方法の実用化により、二次災害の恐れがある倒壊構造物など、人を近づけたくない現場において、レスキュー活動や復旧のための内部探査が可能になります。また、線量計やガレキの削孔・切断機能を能動スコープカメラ部に付加することで、福島第一原子力発電所の原子炉建屋内部の探査も可能になります。
被災建物内探査システムの要素技術≪能動スコープカメラ≫
推進力
ホース状の装置表面を覆う繊毛に振動を与えることで推進力が発生します。
方向制御
内視鏡のように先端部に設けた2箇所の関節を折り曲げることにより、任意の推進方向を選択出来ます。
被災建物内探査システム「ロボ・スコープ」