May 25, 2018
Shimizu Corporation (President: Kazuyuki Inoue) has developed an AI-based support system for shield excavation planning in cooperation with the Nagoya Institute of Technology as one part of a next-generation tunnel construction system that uses the latest technology. The chief feature of this system is its use of reinforcement learning to come up with the optimal solution through a self-learning AI system that learns by trial and error. It draws conclusions on the numerical parameters of the plan for operating the shield machine and the plan for segment placement. Shimizu plans to verify this system to create the plans at the shield tunnel construction site for the Tonoharu No. 1 Main Rainwater Drainage Canal being built in the city of Fukuoka.
Before the actual shield construction begins, a preliminary simulation is performed to determine how to guide the shield machine along the planned linear route, which includes curved segments, and the layout of the many segments of differing shapes to determine the numerical parameters for the plan. It is especially important to pay careful attention to the method for guiding the shield machine operation along the curve radius of the curved alignment.
Up to now, the plan parameters have been calculated by using trigonometric functions in theoretical calculations based on the shape of the shield machine, the radius of the tunnel curves, and other factors. This system improves the plan parameters the system itself has set through repeated AI-based self-simulation. This system was developed by designing an AI simulation program that treats shield excavation as a game. It was developed by combining Shimizu’s expertise in shield construction with the AI programming expertise of Professor Shohei Kato of the Graduate School of Engineering Omohi College, Nagoya Institute of Technology.
In this “excavation game,” the system simulates excavation along the planned linear route it has been given, based on self-set parameters for how to guide the machine as it operates and trial parameters for segment divisions. It then scores the results by evaluating benchmarks such as the variance from the excavation trajectory along the linear tunnel route and the degree of impedance of the shield machine by segments and the ground on the tunnel sides. If the excavation error exceeds the permissible limit during operation, or if the potential for impedance of the shield machine by a segment arises, the trial operation is terminated at that point. The trial parameters are then reset and a new simulation is performed. The AI proceeds to learn on its own what parameters to choose in order to obtain the highest score as it repeats the simulations an enormous number of times. It ultimately arrives at a score that it cannot beat. The trial parameters are determined to be the optimal solution at this stage and are used in the excavation plan.
This system can also be used to produce the daily work orders for excavation during the excavation process in addition to use in the planning stage before excavation begins. The AI can be expected to reduce the number of work hours required to engineers at the job site by performing simulations to correct the plan based on the latest excavation parameters.
Shimizu is working on research and development aimed at automating shield machine excavation as one part of an initiative targeting the use of AI in shield construction. We are currently working on the development of AI models to control earth pressure and to control direction that will replicate the movements of the shield machine when operated by a skilled operator. We intend to introduce a guidance system that incorporates both of these models in building the Tonoharu No. 1 Main Rainwater Drainage Canal to verify the safety and prediction accuracy of the system.
<< For Reference >>
Image of Support System Developed for Shield Excavation Planning
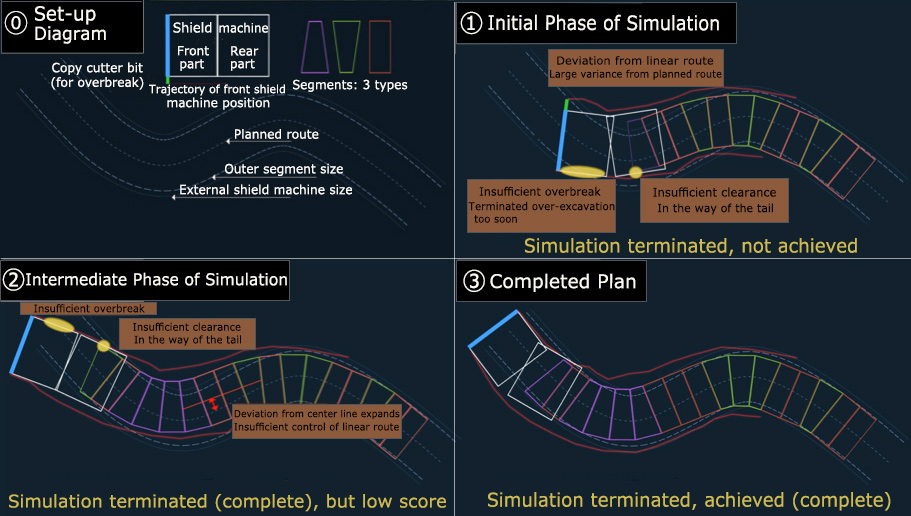
Controlling the Direction of the Shield Machine on Curved Alignment
When excavating the curved segments, the shield machine performs a bending maneuver in which the ground surface being excavated is “over-excavated” and the shield machine is “bent” in the middle by setting the angle between the front and rear sections of the shield machine to prevent the tunnel sides from impeding its progress. The numerical parameters for the timing and amount of soil excavated for the overbreak and the angle of bend in the shield machine are set when creating the excavation plan.
The information contained in this news release is the current information on the date of publication. Please be aware that this information may have changed by the time you view it. Please contact the company to inquire for further details.