2025.06.06
清水建設(株)<社長 新村達也>は、国立研究開発法人土木研究所<理事長 藤田光一>、日立建機(株)<執行役社長 先崎正文>と共同でこのほど、土木研究所が整備を進めている建設機械の自動施工技術基盤(OPERA:Open Platform for Earthwork with Robotics and Autonomy)を活用した油圧ショベルの自動施工実験を行い、土砂の掘削からダンプカーへの積載に至る一連の作業をシームレスに自動化することに成功しました。当社は今後、複数の建設機械を制御する自動施工システムのプラットフォームとしてOPERAを活用し、土工事の無人化施工の社会実装を進めていく考えです。
少子高齢化に伴う生産年齢人口の減少により建設業の生産能力の低下が危惧される中、土工事においては、建設機械が周辺環境を把握し、与えられた指示に従い自ら判断して作業を遂行する自動施工の社会実装が求められています。こうした背景の下、土木研究所では、自動施工の研究開発用プラットフォームとしてOPERAの整備を進めています。OPERAは、ロボットシステムの構築に利用されているROS(Robot Operating System)に対応した建設機械の自動制御プラットフォームで、各種の自動運転対応型建設機械を共通の信号で制御できる通信インターフェースを備えています。
建設機械の自動施工に関する研究開発はこれまで、建設会社と建設機械メーカーが個別に秘密保持契約を結び、当該メーカーの建設機械に特化した制御プログラムを開発するのが一般的でした。このため、建設会社と建機メーカーの組み合わせが変わるたびにカスタマイズが必要となるなど研究開発の効率性に課題がありました。OPERAを活用することで、異なるメーカーの建設機械を統合制御する自動施工システムの構築が容易になり、建設現場への実装が加速することが期待できます。
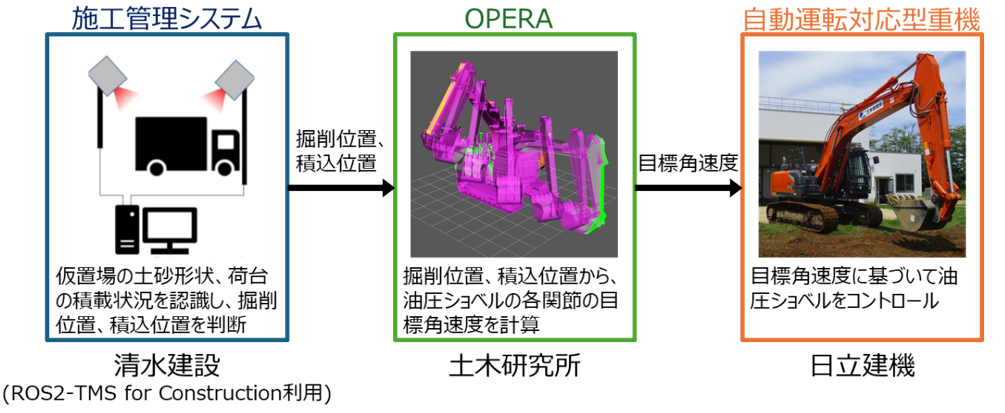
3者が実施した自動施工実験では、シールドトンネル工事で掘削された土砂の場外搬出作業をユースケースとして設定。実験エリアに仮置きした土砂を油圧ショベルで掘削し、指定位置に停車したダンプカーに積載するまでの一連の作業の自動化に取り組みました。具体的には、油圧ショベルの周辺に設置した複数の3D-LiDARを用いて土砂の仮置場やダンプの停止場所付近の3D形状を常時取得し、認識した地形情報を基に土砂の掘削やダンプへの積載に関する指令を油圧ショベルに出力する自動施工システムを構築。掘削時には、油圧ショベルが仮置場の土砂形状に基づき効率的に土砂をバケットに取り込み、ダンプへの積載時には、荷台の積載状況を踏まえて、空いているスペースに土砂を積載するよう油圧ショベルの動作を制御します。これらの作業を繰り返し、荷台が満杯になった段階で土砂の積載を停止します。
実験の結果、掘削から積載までの一連の作業をシームレスに実現することができました。なお、今回の自動施工実験では、重機に動作指令を与えるROSに、内閣府が主導する戦略的イノベーション創造プログラム(SIP)の一環として九州大学が開発を進めているオープンソース「ROS2-TMS for Construction」を利用しています。
当社は今後、OPERAを活用した建機制御技術の現場適用を進めるとともに、無人での自動施工に向けた技術開発を推進していく考えです。
以上
≪参 考≫
OPERAを活用した油圧ショベルの自動施工実験

ニュースリリースに記載している情報は、発表日現在のものです。ご覧になった時点で内容が変更になっている可能性がございますので、あらかじめご了承ください。ご不明な場合は、お問い合わせください。