2021.11.19
清水建設(株)<社長 井上和幸>は、シールド工事の掘進計画の立案およびマシン操作の自動化を目的に開発したAI施工合理化システム「シミズ・シールドAI」を姫路市汐入川才西川放水路幹線建設工事(兵庫県姫路市)に導入し、初期掘進完了後の2022年3月からAIによるシールド機の自動運転を開始します。
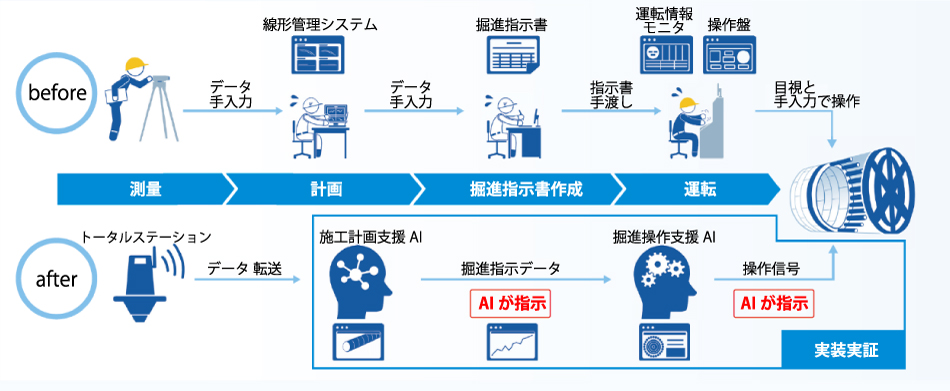
シールドトンネル工事は、建設工種の中では比較的、機械化が進んでいるものの、日々の掘進計画の検討やシールド機オペレーターへの掘進指示書の作成に多大な手間と時間を要しているのが現状です。また、シールド機の運転時には、切羽圧力やシールド機の負荷状態など多数のデータを監視しながら最適な制御方法を判断しなければならず、オペレーターにかかる負担は少なくありません。そこで当社は、AIを活用して日々の測量からシールド掘進機の操作までの流れを合理化するシステム「シミズ・シールドAI」を開発しました。
シミズ・シールドAIは、シールドトンネルの掘進計画を支援する「施工計画支援AI」と、シールド機の操作を支援する「掘進操作支援AI」の2種類のAIシステムから構成されます。今回の導入現場では、日々の掘進作業終了時に取得する測量データをシミズ・シールドAIに展開し、2つのAIシステムの機能を連携させることで、掘進計画の立案からシールド機運転に至る一連の施工サイクルの自動化を図ります。
施工計画支援AIは、名古屋工業大学と共同開発したAIシミュレーションプログラムで、トンネルの計画線形に対するシールド機の掘進方法と形状の異なる複数のセグメントの割り付け方法について三次元でシミュレーションを繰り返し、得られた最適解を掘進計画として提示します。開発にあたっては、実際の工事現場をモデル化してアルゴリズムの検討を続け、延長414m・セグメント数242リングの道路工事トンネルモデルでは、制約条件を満たす掘進計画をわずか25分で導き出しました。
一方、掘進操作支援AIは富士通(株)の協力を得て開発したもので、与えられた掘進計画を具現化する最適なジャッキパターンを予測します。具体的には、熟練オペレーターの実操作内容を教師データとして学習したAIが、掘進中のシールド機の姿勢や総推力、カッタトルク、ジャッキストローク値などさまざまな情報から、シールド機を推進する複数本のジャッキの最適な制御方法(ジャッキパターン)を瞬時に判断・選択することで、掘進計画通りの施工を実現します。これまで複数の現場に実装して予測内容の精度検証を行い、例えば、道路トンネルのカーブ区間(R=220m)での適用時には、掘進中に変化させるべき方位角変化量の指示値(0.32度)に対し、わずか0.02度の誤差でシールド機の掘進方向を制御することに成功しています。
当社は今後、シミズ・シールドAIの現場実装を推進するとともに、トンネル坑内の資材自動搬送など他の施工合理化技術との機能連携を図ることで、シールド工事のさらなる生産性向上につなげていく考えです。
以上
≪参 考≫
シミズのAIによるシールド工事の生産性向上イメージ
現場の概要
| 工事名称 | 姫路市汐入川才西川放水路幹線建設工事 |
|---|---|
| 工事場所 | 自)兵庫県姫路市広畑区小坂 至)兵庫県姫路市広畑区才地内 |
| 発 注 者 | 地方共同法人 日本下水道事業団 |
| 施 工 者 | 清水・森長・宇鷹 特定建設共同企業体 |
| 工事内容 |
|
| 工 期 | 2020年6月~2023年3月 |
ニュースリリースに記載している情報は、発表日現在のものです。ご覧になった時点で内容が変更になっている可能性がございますので、あらかじめご了承ください。ご不明な場合は、お問い合わせください。