2017.07.12
清水建設(株)<社長 井上和幸>はこのほど、建築工事現場の生産性向上、苦渋・反復作業の軽減、検査・管理業務の高効率化を目的に、BIMを核とする情報化施工により、最先端技術を搭載した自律型ロボットと人がコラボしながら工事を進める次世代型生産システム「シミズ スマート サイト」を構築しました。すでに、シミズ スマート サイトを構成する個々のロボット・建機の適用現場が決まっており、来年早々にも関西においてシステム全体を適用した高層ビルの建設工事に着手し、竣工までにロボットを適用する工種において70%以上の省人化を目指します。
熟練の技能労働者の大量離職が懸念される中、入職者の確保と並び生産性の向上が喫緊の課題になっています。生産性の向上は、賃金改善、休日拡大などの処遇改善の鍵を握ることから、国土交通省は2016年を生産性革命元年と定め、情報化施工を前提とする「i-Construction」の導入に着手しました。当社はこの流れを踏まえ、建設業界における情報化施工の先導役になるべく、シミズ スマート サイトを構築し、システムを構成する自律型ロボットの開発・製造を進めてきました。
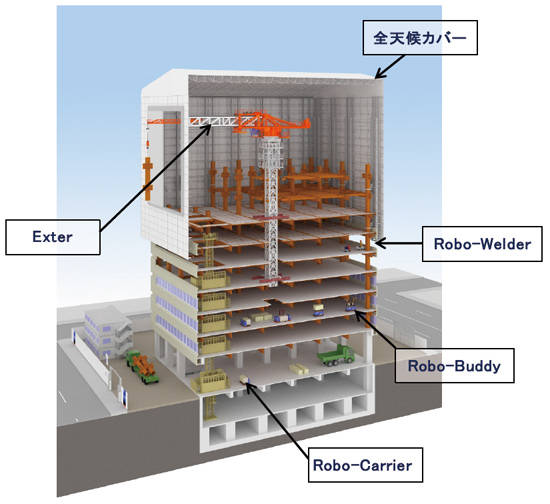
シミズ スマート サイトを構成する自律型ロボットと建機は、ブームを伸縮させて作業半径を調整する水平スライドクレーン「Exter」、溶接トーチを自在に操る柱溶接ロボット「Robo-Welder」、天井や床材を2本の腕で巧みに施工する多能工ロボット「Robo-Buddy」、「Robo-Carrier」を核とする4種類の水平・垂直搬送ロボットで構成されています。各ロボットはAIやIoTを駆使し、タブレット操作によりロボット統合管理システムから送信される作業指示に基づき、自己の所在位置を認識しながら現場内を移動し、施工対象物を認識しながら自律的に稼働します。稼働状況や作業結果は統合管理システムにリアルタイムに記録・蓄積され、タブレット画面上でいつでも確認できます。
シミズ スマート サイトの適用現場では、基礎工事終了後、建物をすっぽり覆う全天候軽量屋根「全天候カバー」を組み立て、その中に設置されたExterが鉄骨の柱・梁を順に所定の位置に吊り込み、Robo-Welderが柱を溶接しながら躯体工事が進みます。下層階からはRobo-Buddyが最終工程となる天井、床を仕上げていきます。現場に搬入された資材は、夜のうちに、Robo-Carrierを核とする水平・垂直搬送ロボットにより所定の作業階に搬送・仮置きされた後、Robo-Buddyの作業場所まで搬送されます。
シミズ スマート サイトを30階建て、基準床面積3,000m2クラスのビルに適用した場合の省人化の効果(削減率)は、揚重・搬送作業で75%、2,500人、天井・床施工で75%、2,100人、柱溶接作業で70%、1,150人、計6,000人近くになるという試算結果が出ています。省人化効果により、個々の建機・ロボットは2~3現場転用することで減価償却が可能です。
当社は今後、シミズ スマート サイトの全体適用はもとより、構成要素の部分適用を図ることで生産性の向上を図り、将来の技能労働者不足に備え、より魅力ある建設現場の実現を目指します。
以上
≪参 考≫
1.シミズ スマート サイトの概念図
2.シミズ スマート サイトの構成要素の概要
Exter
従来のタワークレーンに見る屈伸タイプのブームと異なり、ブームを水平方向に伸縮できる機能を組み込んでいることが最大の特徴です。クレーンの能力は、定格荷重12t、作業半径は最小3m、最大25mで、200mクラスの超高層ビルにも適用できます。なお、全天候カバーとExterの組み合わせは、解体工事にも適用できるため、今後、適用案件の急増が見込まれます。製造委託先はIHI運搬機械(株)で、6月末に2機が完成します。関西の高層ビルが初適用現場になります。

Robo-Welder
大阪大学大学院工学研究科の浅井知教授との共同開発です。専用の走行台車上にセットされたロボットを所定の位置まで誘導すれば、作業員の介在なく完全自動溶接を行います。ロボットはレーザー形状計測により溶接部位の溝の形状(開先形状)を認識。6軸で自由自在に動くロボットアーム先のトーチによりその溝を溶接材料で的確に埋めていく条件をリアルタイムに決定します。ロボット2台が対になって溶接作業を行います。溶接済みの部位の品質を同じくリアルタイムに非接触で検査できるシステムも導入予定です。製造委託先は愛知産業(株)で、すでに3現場への適用が決まっています。

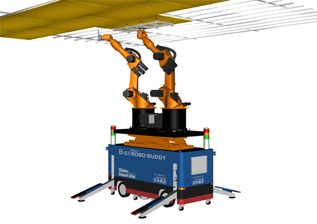
Robo-Buddy
レーザーセンサとBIM情報の照合により自分の所在位置を認識し(SLAM機能)、指示された作業場所まで自動で移動します。また、20cmの段差を乗り越える特殊機能を付加しています。作業を行う2台のロボットアームは6軸で自由に動き30㎏の資材まで把持でき、自動走行台車の昇降式台座上で稼働します。画像センサとレーザーセンサで施工部位を認識した上で、二本のロボットアームを駆使しながら天井吊ボルトのインサートへの挿入、下地材の組み立て、天井ボードの取り付け、ビス留め、OAフロアの台座・パネルの設置などを行います。ロボットアーム先端の手先部(エンドエフェクタ)を取り換えることで多能な機能を発揮します。製造委託先は東洋鐵工所(株)で、(株)アットロボティクスの開発協力を得ています。関西の高層ビルが初適用現場になります。

Robo-Carrier を核とする自動搬送システム
現場に搬入された資材をRobo-Buddyの作業場所まで自動搬送するシステムです。水平搬送役を担うRobo-Carrier を核とする4種類のロボットがシステムを構成し、統合管理システムの指示により連携して稼働します。11月から都内の現場で稼働します。Robo-Carrierは、レーザーセンサとBIM情報の照合により自分の所在位置を認識し、指示された作業場所まで資材を自動搬送します。障害物があると搬送ルートを自動的に再検索・修正します。

地上階に配備するRobo-Carrierはパレット積みの資材をRobo-Carrier と連動するELV「Autonomous-ELV」に積み込み、ELVが搬入階に到達すると別のRobo-Carrier が資材をパレットごとELVから積み出し仮置き場まで搬送。仮置き場に置かれた資材は「Robo-Fork」によりRobo-Buddyの相方となる台車「Robo-Assist」に積み替えられ、Robo-Buddyの基に運ばれます。
全天候カバー
仮設足場で構成する外周材と軽量鉄骨のトラスで構成する屋根材からなり、屋根部は防水シートで、外周部は透光性の優れたメッシュシートで覆います。簡易な構造で軽量のため、建物の躯体を補強する必要はありません。関西の高層ビルが初適用現場になります。
ニュースリリースに記載している情報は、発表日現在のものです。ご覧になった時点で内容が変更になっている可能性がございますので、あらかじめご了承ください。ご不明な場合は、お問い合わせください。